基于单片机智能变形搜救机器人电路系统设计
题目一种变形搜救机器人的设计
一、课题的目的和意义:地震、火灾、矿难等灾难发生后, 在废墟中搜寻幸存者, 给予必要的医疗救助, 并尽快救出被困者是救援人员面临的紧迫任务。实际经验表明, 超过48 小时后被困在废墟中的幸存者存活的概率变得越来越低。由于灾难现场情况复杂, 在救援人员自身安全得不到保证的情况下是很难进入现场开展救援工作的, 此外, 废墟中形成的狭小空间使搜救人员甚至搜救犬也无法进入。灾难搜救机器人可以很好地解决上述问题。机器人可以在灾难发生后第一时间进入灾难现场寻找幸存者, 对被困人员提供基本的医疗救助服务, 进入救援人员无法进入的现场搜集有关信息并反馈给救援指挥中心等。 近十年来, 尤其是“911”事件之后, 美国、日本等西方发达国家在地震、火灾等救援机器人的研究方面做了大量的工作, 研究出了各种可用于灾难现场救援的机器人。可在灾难现场废墟中狭小空间内搜寻的各类机器人如可变形多态机器人、蛇形机器人等相继被开发出来这个机器人搜救工作的首要任务是进入灾区。
本课题为了能进入狭小空间展开搜救工作, 要求机器人的体积要尽可能小, 但体积小了搜索视野就会受到限制, 为了解决这一矛盾, 本课题在传统牵引式搜救机器人平台基础上, 对多态搜救机器人进行研究。
二、课题研究的主要内容(论文提纲):本课题根据国内外机器人的发展现状,对于在灾难发生后,如地震,火灾等,人员不宜进入或无法进入的特殊环境,进行了初步分析,设计一款能够在复杂环境中能够自由行走,并发现被困目标的搜救机器人。 机器人以STM32单片机为核心,搭载烟雾传感器,温度传感器等。且机器人具有变形功能,当遇到狭窄路面可将体积缩小进入狭小空间进行搜救,而穿越废墟路面时,可进行轮子形态的变换,从而快速穿过废墟。机器人主要通过避障传感器,轮子形态变换和车体变形来达到躲避障碍物,穿越废墟和穿越狭窄地带。机器人通过热释电红外传感器来探查被困人员。当检测到被困人员后,机器人会通过蓝牙串口模块将被困人员信息发回上位机软件同时也实时地将烟雾浓度,温度等信息传到上位机上。当地面人员收到信息后立即根据被困人员受困情况组织营救。
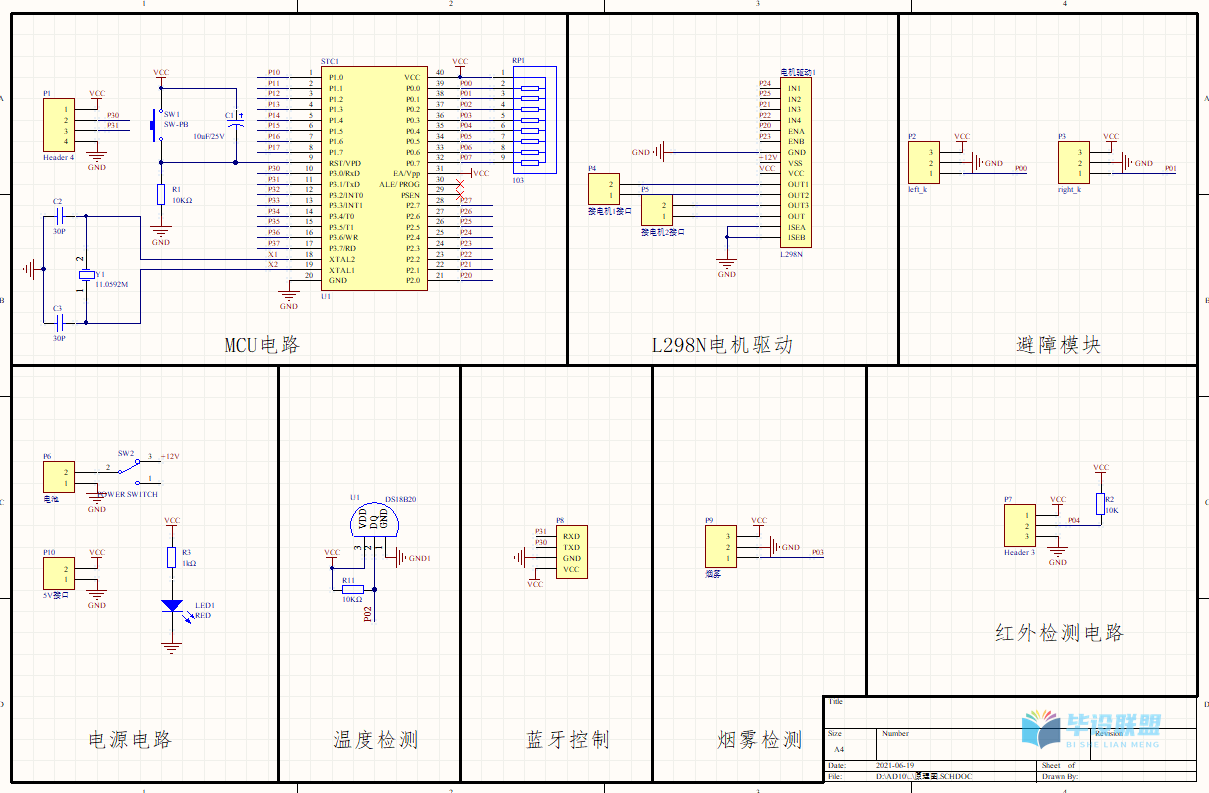
机器人原理图:
三、文献检索及参考文献目录(列明文献检索的数据库名称及检索策略,参考文献至少15篇以上):文献检索的数据库主要有万方博硕士全文数据库、中文期刊全文数据库、EBSCO全文期刊数据库、中国知网、维普期刊。通过键入关键词,进行中文检索,然后获取相关资料。参考文献:
[1] 郑超,赵言正,付庄.一种小型履带机器人结构设计与实现[J].机电一体化.2007.4.70-72.
[2] 郑浩峻,汪劲松,李铁民. 可重构机器人单元结构设计及组合特性分析[J]. 机械工程学报, 2003, 39(7): 34-37.
[3] 徐敏,周心权,赵红泽,邢书仁. 灾变期井下遇难人员搜寻定位方法初探[J].煤炭科学技术.2003.31.12.114-117.
[4]陈丽,王越超,李斌. 蛇形机器人研究现况与进展[J]. 机器人,2002,24(6):559-563.
[5] 侯宪伦,葛兆斌,李向东,孙洁,张东. 井下探险救援机器人的设计[J]. 煤矿机械.2009.8.30.8.18-20.
[6] 王靖,李斌等.模块化可变形机器人控制系统设计与变形方法研究[J].机器人,2006 28(5)458-460
[7] 王国强,程悦,殷涌光.多履带车辆转向性能分析[J].吉林工业大学学报. 1994 (1) 1-9
[8] 张玉华,赵杰,张亮,等.新型模块化可重构机器人系统[J]. 机械工程学报,2006,42(增刊):175-178.
[9]李树军,张艳丽,赵明扬.可重构模块化机器人模块及结构设计[J].东北大学学报;自然科学版,2004,(1);78-81
[10]费燕琼,夏振兴,夏平. 自重构机器人的基本模块结构设计与分析[J]. 中国机械工程, 2007, 18(9)
[11]王巍,张厚祥,邓志诚,等. 基于串并联机构的自重构移动机器人[J]. 机械工程学报,2008,44(5):92-101.
[12]苏军. 多足步行机器人步态规划及控制的研究[D]. 武汉: 华中科技大学,2004: 15-16.
[13] 钱善华, 葛世荣, 王永胜等. 救灾机器人的研究现状与煤矿救灾的应[J]. 机器人, 2006,28( 3) : 350-353.
[14]陈丽,王越超,李斌. 蛇形机器人[J]机器人,2002,24(6):559-563.
[15] 郑浩峻,汪劲松,李铁民. 可重构机器人单元结构设计及组合特性分析[J]. 机械工程学报, 2003, 39(7): 34-37.
四、课题研究的基础、现状与趋势(基于对参考文献资料的分析、综合与归纳,不少于1000字):1.基础随着机器人技术的快速发展,各种各样的机器人不仅仅出现在工厂、实验室、研发机构,还出现在了普通的家庭。这些机器人各式各样有着不同的本领,能轻松的帮助人们处理各类的家务,让整个家变得越来越智能化,给每个家庭带来了越来越多的方便。这些机器人还普遍出现在了普通的小工厂,由于这些机器人的非常灵活,以前必须由笨重机器来完成的工作,现在都由这些智能机器人所代替,这些智能机器人不仅能很好完成自己的任务,并且工作的效率非常高。所以现在机器人技术正在向我们的生活普遍,我们的生活需要这些机器人的帮助。
在进行本课题之前,查询了大量的资料。在图书馆借阅关于课题的书籍,现在网络技术也是非常发达,可以通过网络来查询到所需要的资料,还有学校提供的各种网上论文数据库,这些都为本课题的完成提供了坚固的基础。我是电气工程学院测控技术与仪器的学生,对本课题也是比较理解,有了这些支持我会很好的完成本课题。
2.现状
近十年来,尤其是“911”事件之后,美国、日本等西方发达国家在地震、火灾等救援机器人的研究方面做了大量的工作,研究出了各种可用于难现场救援的机器人。目前各种搜救机器人发展迅速,技术逐渐成熟,在美国、欧洲等发达国家已开始装备使用。美国iRobot公司研发了PackBot多态搜救机器人,它能在崎岖的地势环境中工作并且能够翻越直角障碍,其主要的工作是负责侦察任务、搜寻灾后幸存者、勘查易燃易爆品等任务。InuKtun公司研发出了机器人MicroVGTV它整体可以变形,经电缆控制,具备直视功能的彩色摄像头,并内置有微型拾音器和扬声器,可用于和废墟中的受困人员对话,适用在较小的活动环境中执行任务。
我国的搜救机器人研究起步较晚,但最近几年发展较快,引起越来越多研究机构的关注。例如哈尔滨工业大学、上海交通大学、沈阳自动化研究所、广东卫富公司等都研制了各自的搜救机器人系统,中国矿业大学与清华大学等几家机构也研制了用于煤矿井下救援的移动机器人平台。但目前国内的搜救机器人大多仍处于原理样机的研究上,或局限在室外危险物排除这种应用案例的应用上,尚未有机器人参与到矿难、地震、建筑物坍塌等实际灾难现场救援的报道。在2010年4月2日王家岭透水事故发生的过程中,中国科学院沈阳自动化研究所研制的水下机器人曾被带到现场,试图参与透水现场的探测任务,虽然最终没有采用,但也不失为一次有益的尝试,为透水事故探测救援积累了宝贵的经验。
3.趋势
随着全球环境的变化,工作、生活中发生的意外事故的增多,搜救机器人必然诞生。由于灾难现场情况复杂,在救援人员自身安全得不到保证的情况下是很难进人现场开展救援工作的,此外,废墟中形成的狭小空阀使控救人员甚至搜救犬也无法进入。灾难搜救机器人可以很好地解决上述问题。机器人代替了救援人员进入灾区和执行任务的环境检测、搜寻受伤的矿工和灾难发生后的幸存者。+
这个机器人搜救工作的首要任务是进入灾区。这是困难的机器人进入限制空间和非结构化的地下地形,所以这些移动系统需要很好的越障性能和运动性能在这种恶劣环境执行任务,使用一些传感器能够在低能见度和充满爆炸性气体和尘埃的环境下完成对地形的识别;国外一些国家在发生灾难后利用机器人参加搜救行动的例子很多,而国内的搜索救援行动中,很少见到搜救机器人的影子,这说明我国的搜救机器人还处于发展阶段.
五、本课题解决思路或实验方法搜救机器人的主要功能包括搜索探测与救援,环境探测与人员搜索任务是目前搜救机器人的主要功能,其搜索与探测能力主要取决于其自身携带的传感器的类型与应用情况。作为搜救机器人的感知系统,传感器必须具备信息采集、信息存储与分析以及信息传输等功能,同时要求其具有较小尺寸、足够的分辨率和响应时间,以及很好的稳定性和可靠性等特点。极有可能出现浓烟、灰尘等恶劣情况,在这种环境下很多传感器特别是视觉系统会受到严重的影响。而远红外探测器具有很好的穿透烟雾进行探测的能力,并且可以同时获得被测物体表面的辐射温度,因此采用远红外成像仪进行复杂环境的探测既可以作为可见光视觉系统的补充,又可以通过对些特殊物体表面辐射温度的测量实现目标的识别,如人体、着火点、水域等。重点一、机器人结构设计
本课题需要的传感器比较多,外围电路也随之增加,必需认真仔细的去设计每一个电路。传感器比较多就导致接线比较多,接线时必需对应,减少调试不必要的麻烦。
重点二、软件设计及调试
1、用C语言编程
控制器编程是用C语言编写的,控制器就是本课题的心脏,控制器需要采集数据、处理数据、发送数据,这些都需要C语言的支持,要熟练的控制控制器工作就必须熟练掌握C语言编程。
2、上位机的编写
虽然有一定的Visual Basic语言基础,但是从来没有接触过上位机软件的设计,这就要求找关于这方面的资料学习,同时去请教一些有经验的同学,从而把上位机软件设计的简洁完美。