
693【毕设课设】基于单片机智能循线避障智能小车系统设计
【摘要】:
提出了一种智能循线避障小车的设计方法,利用红外技术检测障碍物和采集地面信息,采用AT89S52单片机进行适时控制,实现智能循线和避障,并且精确地显示运行速度等参数。智能小车采用后轮驱动,两轮各用一个步进电机执行,速度检测的传感器采用红外对射式,寻路避障用的传感器采用红外反射式,速度检测的码盘采用手工制作。
【关键词】:
循线 避障 红外传感 码盘
本次设计的智能小车实现的基本功能如下:
v实时检测路径,并按照指定路线行驶;
v实时检测障碍物,并躲过继续行驶;
v实时显示当前速度,并显示在lcd1602上
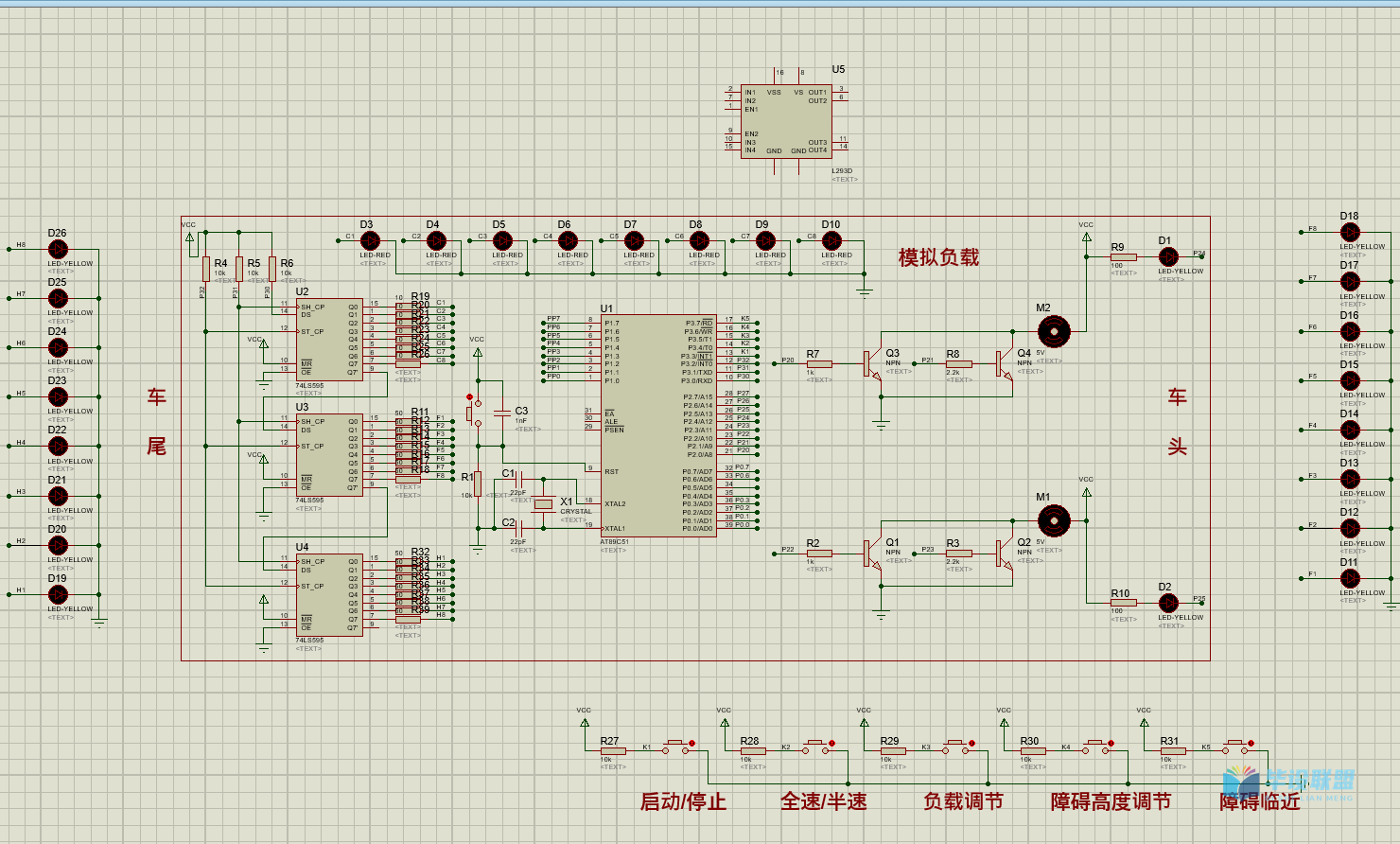
为此以AT89C52为主控芯片,主要包括避障模块、电源模块、声控模块、电机驱动模块等,系统框图如图2.3所示。通过寻迹及避障传感器来采集周围环境信息来反馈给CPU,通过主控的处理,来控制电机的运转,从而实现寻迹与避障,达到智能行驶。且本设计添加了声控效果,通过声音传感器来对小车发出指令,让其行驶与停止。
为了能够更好地完成本次设计任务,我们采用三轮车,其前轮驱动,前轮左右两边各用一个电机驱动,调制前面两个轮子的转速起停从而达到控制转向的目的,后轮是万象轮,起支撑的作用,并通过软件程序控制,与硬件架构相结合,从而实线自动寻迹、避障的功能。

声明:本站所有文章、资源,如无特殊说明或标注,均为网络网友上传,设计版权均归原作者所有,资源下载后仅供个人学习研究使用,严禁未取得作者版权后在网上传播。任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可向平台提供完善的侵权信息,联系我们进行处理。




